



Decodifica intenzioni motorie e possibilità di riprodurre i movimenti di una mano naturale: passo avanti con una nuova interfaccia integrata alla protesi robotica sviluppata dalla Scuola Superiore
Il controllo naturale di una protesi non può prescindere dalla percezione del movimento da parte di chi la indossa. Uno studio coordinato dalla Scuola Superiore Sant’Anna di Pisa, pubblicato sulla rivista internazionale Science Advances, ha sviluppato una nuova interfaccia bidirezionale per protesi di mano che utilizza vibrazioni generate da magneti impiantati nei muscoli residui dell’avambraccio per ripristinare sensazioni di movimento naturali.
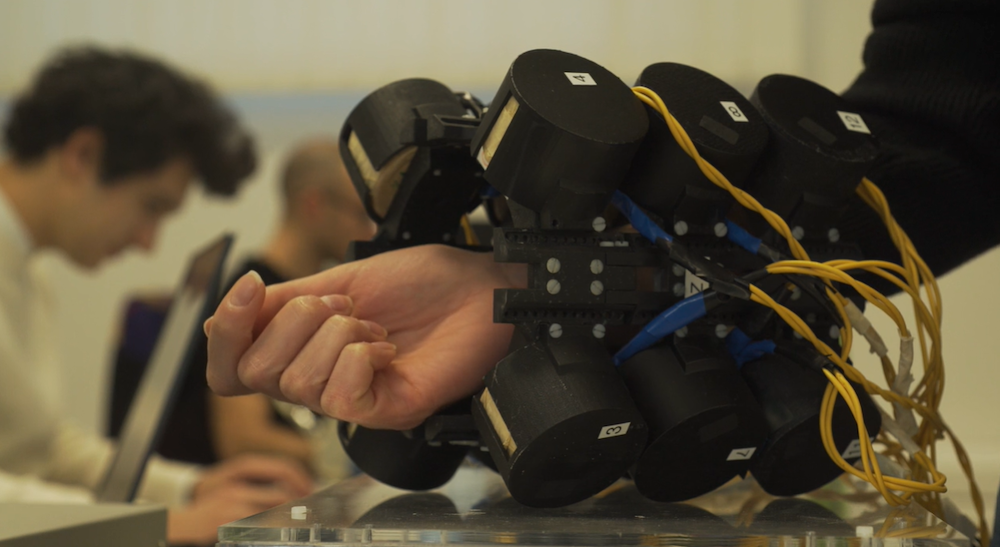
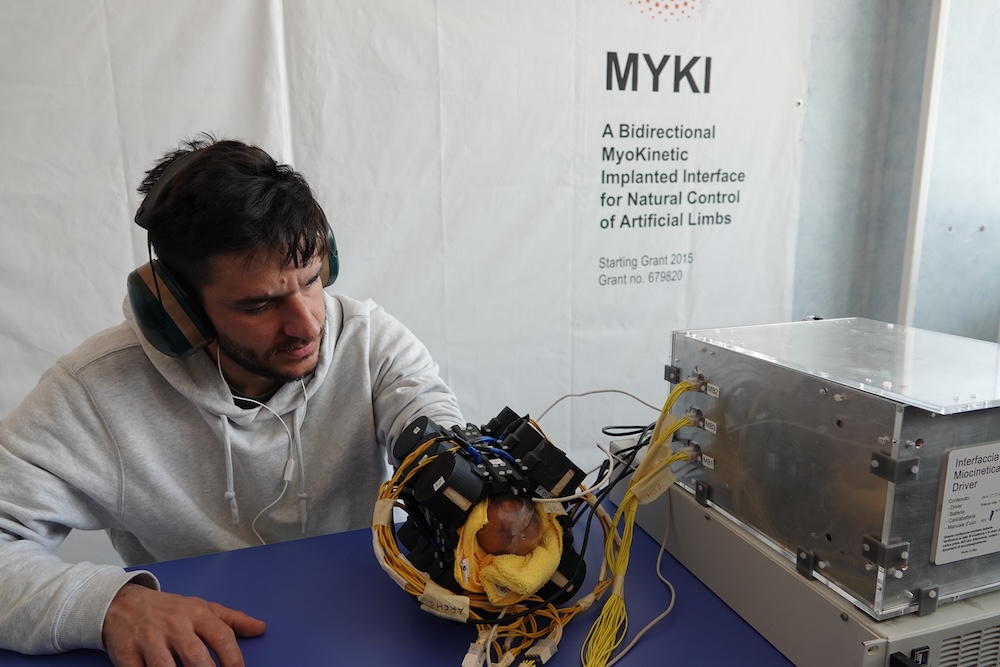
L’interfaccia, integrata alla mano robotica Mia Hand sviluppata dalla spin-off Prensilia, è stata sperimentata per sei settimane su un paziente italiano. Dopo lo studio pubblicato a settembre del 2024 su Science Robotics, grazie al quale è stata validata la prima fase della sperimentazione, strettamente legata alla capacità della mano robotica di riprodurre un’ampia gamma di movimenti, questo ulteriore risultato scientifico apre la strada a un controllo più intuitivo delle protesi.
Sensazioni cinestetiche naturali in una persona amputata
(Scuola Superiore Sant'Anna)
Quando una persona perde una mano e inizia a usare una protesi, non è più in grado di sentire i propri movimenti. Viene a mancare la cosiddetta "cinestesia", cioè la capacità di percepire come si muovono e dove si trovano gli arti nello spazio, senza bisogno di guardarli. L'amputazione, infatti, spezza il legame tra il movimento e la sensazione che normalmente lo accompagna, e questo rende molto più difficile usare una protesi in modo naturale e intuitivo.
La cinestesia è una sensazione generata soprattutto all'interno dei muscoli. Nelle persone amputate viene studiata a fondo, per capire come ripristinare la sensazione di movimento dell'arto perduto. Non esistendo un metodo per stimolare i muscoli in modo diretto, la tecnica principale consiste nel somministrare vibrazioni superficiali, che coinvolgono però sia la pelle sia i muscoli sottostanti. Questo tipo di stimolazione attiva quindi allo stesso tempo i recettori cutanei e muscolari, rendendo difficile capire quanto la sensazione di movimento dipenda davvero dalla sola muscolatura.
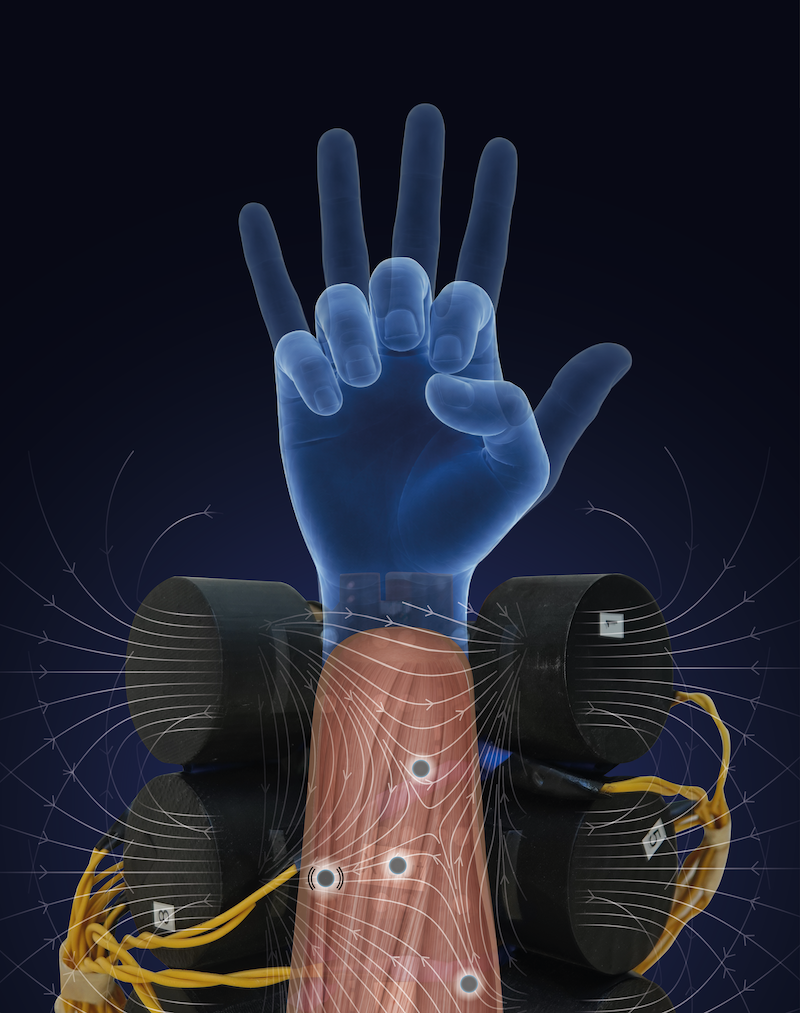
Per superare questo limite, il team di ricerca della Scuola Superiore Sant’Anna ha sviluppato una nuova interfaccia: la myokinetic kinesthetic interface (MKkI). Piccoli magneti vengono impiantati nei muscoli dell'avambraccio, e una serie di bobine esterne (solenoidi) li fa vibrare da remoto in modo mirato. In questo modo si stimolano soltanto i muscoli, ed è proprio questa vibrazione a far nascere sensazioni di movimento naturali. Grazie a queste vibrazioni, il paziente è riuscito a percepire la mano che si apriva e si chiudeva con movimenti coordinati, molto simili a quelli reali.
"La myokinetic kinesthetic interface è unica nel suo genere: grazie a un semplice impianto passivo e mininvasivo, siamo in grado di stimolare la muscolatura senza alcun contatto con la pelle. Si tratta di una sorta di stimolazione intracorporea, che non solo può essere la chiave per comprendere meglio come funziona il controllo motorio umano, ma anche per capire come ripristinarlo in persone che subiscono un’amputazione", riporta il dottor Federico Masiero, primo autore dello studio, al tempo degli esperimenti dottorando presso la Scuola Sant’Anna e al momento ricercatore al Munich Institute of Robotics and Machine Intelligence(MIRMI) del Technical University of Munich (TUM).
Le prospettive della ricerca: verso un impianto permanente
Il prossimo obiettivo è sfruttare simultaneamente i magneti impiantati sia per il controllo della protesi sia per la restituzione di percezioni sensoriali naturali, favorendo un’interazione persona-robot sempre più efficace e interconnessa. Un passaggio fondamentale per arrivare ad una soluzione che possa effettivamente cambiare la vita di persone con amputazione è la realizzazione di un impianto permanente.
"La nostra soluzione è stata validata tramite un dimostratore preliminare: l'impianto era stato progettato per durare sei settimane, un tempo che ritenevamo sufficiente per una prima verifica dell'utilità e dell'efficacia dell'interfaccia. I risultati sono stati molto promettenti e ci hanno spinto a esplorare una soluzione impiantabile permanente, finanziata dal Piano Nazionale Complementare al PNRR con il progetto Fit 4 Medical Robotics, che ci consentirà di studiare l'interfaccia su periodi molto più lunghi e con un numero maggiore di partecipanti" dichiara il professore della Scuola Sant’Anna Christian Cipriani, ideatore dell’interfaccia e coordinatore dello studio.
Una nuova finestra per studiare e validare nuove teorie del controllo motorio
(Scuola Superiore Sant'Anna)
La prima dimostrazione di fattibilità della capacità di evocare sensazioni tramite la MKkI è stata ottenuta nell'ambito di una collaborazione tra i professori Cipriani e Paul Marasco della Cleveland Clinic Research, utilizzando minuscoli magneti impiantati e la registrazione dei segnali neurali.
Proseguendo questa collaborazione, i risultati ottenuti in questo nuovo studio sono stati confrontati con quelli di uno studio indipendente condotto dalla Cleveland Clinic e pubblicato nel marzo 2018 sulla prestigiosa rivista internazionale Science Translational Medicine. Le sensazioni descritte dai pazienti nei due studi sono molto simili e portano alla stessa conclusione: a livello della mano, la percezione del movimento viene sempre avvertita come movimento coordinato delle dita.
"Questo studio raccoglie lo sforzo collettivo di due gruppi di ricerca, uno in Italia, uno negli Stati Uniti, che hanno ideato e studiato due interfacce per il ripristino della cinestesia, uniche al mondo. La possibilità di confrontare questi dati, ottenuti in modo indipendente e con approcci diversi, è ciò che rende i nostri risultati promettenti", riporta il Professor Marasco, coordinatore dello studio presso la clinica universitaria di Cleveland.
Il team di ricerca che ha collaborato allo studio
Lo studio, coordinato dall’Istituto di BioRobotica della Scuola Superiore Sant’Anna di Pisa, in collaborazione con l’Azienda Ospedaliero-Universitaria Pisana (AOUP) e Cleveland Clinic, è stato sostenuto da finanziamenti europei, italiani e statunitensi. Alcuni tra questi, i progetti del Consiglio Europeo delle Ricerche (ERC) MYKI e MYTI, i progetti finanziati dal Ministero dell’Università e della Ricerca Italiana Fit For Medical Robotics e PROPRIOUSS. Parte dei dati raccolti negli USA è stata originariamente raccolta nell'ambito di finanziamenti concessi dall'Office of the Director del NIH e dalla DARPA. Il primo autore dello studio è un ricercatore presso la Technical University of Munich, finanziato da una borsa di ricerca Marie Skłodowska-Curie Action.
Fonte: Scuola Superiore Sant'Anna - Ufficio stampa
Notizie correlate

Studio UniPi: i meticci più a rischio neoplasie rispetto ai gatti di razza
I gatti meticci presentano un rischio maggiore di sviluppare neoplasie maligne rispetto ai gatti di razza. È questo il risultato più sorprendente di uno studio coordinato dall’Università di Pisa e pubblicato [...]

Università di Pisa e Fondazione Vita inaugurano un nuovo laboratorio per le Life Sciences
Università di Pisa e Fondazione VITA – Istituto Tecnologico Superiore per le Nuove Tecnologie della Vita hanno inaugurato oggi un nuovo laboratorio polifunzionale congiunto dedicato alla formazione altamente professionalizzante nel [...]

Scoperti oltre 600 nuovi geni associati alla Schizofrenia: anche UniPi nello studio internazionale
Comprendere come le varianti genetiche influenzino il rischio di sviluppare la schizofrenia è una delle grandi sfide della ricerca biomedica. Un importante passo avanti arriva da uno studio pubblicato sulla [...]
Tutte le notizie di Pisa
<< Indietro
